徐齐平
![]()
最后更新时间 : ..
徐齐平,工学博士,副教授,硕士研究生导师。2020年毕业于上海交通大学船舶海洋与建筑工程学院力学专业,曾获北京市优秀毕业生、博士研究生国家奖学金、上海交通大学优博基金。2019年至2020年获国家公派留学赴新加坡国立大学联合培养一年,2025年再次获国家公派留学赴新加坡国立大学访学一年,主要研究方向:软体机器人、仿生机器人及具身智能机器人,软体、连续体、折纸/剪纸驱动器设计与控制,机器人结构-驱动-感知-功能一体化创新设计,智能超材料、柔性可穿戴器件及可折展机构,机器人外骨骼与人机协同一体化,柔性多体系统动力学与控制等。近年来,作为负责人完成优博基金1项,参与国家自然科学基金面上项目3项、企业横向项目2项。2020年入职浙江师范大学,加入工学院鄂世举院长团队,作为负责人主持企业重大横向项目1项、浙江省自然科学基金项目1项、教育部产学合作协同育人项目3项,参与国家自然科学基金面上项目1项。以第一作者 / 通讯作者在《 Soft Robotics》、《Thin-Walled Structures》、《Multibody System Dynamics》、《Smart Materials and Structures》、《Acta Mechanica Sinica》、《International Journal of Smart and Nano Materials》、《Biomimetics》、《中国机械工程》、《振动工程学报》、《上海交通大学学报》等国内外知名期刊上发表SCI/EI论文10余篇,授权发明 / 实用新型专利6项。中国机械工程学会高级会员,中国自动化学会会员,中国发明协会会员,《Theoretical and Applied Mechanics Letters》、《Intelligence & Robotics》等期刊青年编委。Google Scholar h指数11,i10指数15。
代表性科研与教学项目
(1) 浙江省自然科学基金委员会,浙江省自然科学基金探索青年项目,LQ22A020003,气-电混合驱动多自由度软体致动器变刚度机理研究,2022-01至2024-12,10万,在研,主持;
(2) 教育部高等教育司,教育部-北京软体机器人科技股份有限公司产学合作协同育人项目,231006451243847,面向新工科的智能软体机器人应用设计研究,2024-01至2026-01,5万,在研,主持;
(3) 教育部高等教育司,教育部-北京钢铁侠科技有限公司产学合作协同育人项目,202102031009,智能软体机器人教学与课程建设,2022-09至2024-12,5万,在研,主持;
(4) 浙江师范大学一流本科课程,《机器人动力学与运动学》,2022-09至2023-11,2万,结题,主持;
(5) 国家自然科学基金面上项目,52075499,一种基于DEG的全柔性波浪能发电机工作机理及关键技术研究,2021-01至2024-12,58万,在研,参与;
(6) 国家自然科学基金面上项目,11772186,考虑多物理场耦合的气动式软体结构多体系统动力学建模理论研究,2018-01至2021-12,60万,结题,参与。
代表性论文
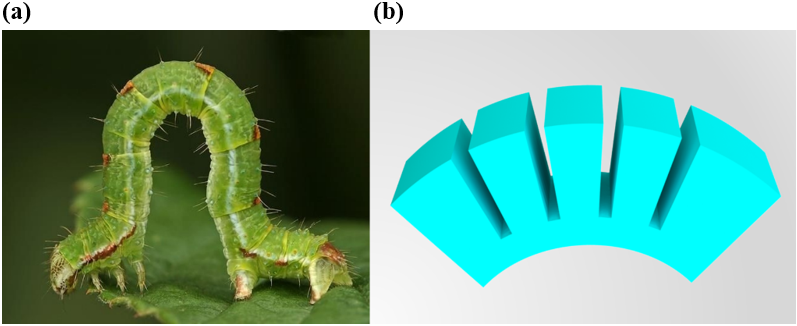
(1) Qiping Xu, Kehang Zhang, Chenhang Ying, Huiyu Xie, Jinxin Chen*, Shiju E*. Origami-inspired vacuum-actuated foldable actuator enabled biomimetic worm-like soft crawling robot[J]. Biomimetics (Basel), 2024, 9(9): 541. (SCI)
(2) Qiping Xu, Chenhang Ying, Kehang Zhang, Huiyu Xie, Shiju E*. An effective nonlinear dynamic formulation to analyze grasping capability of soft pneumatic robotic gripper[J]. International Journal of Smart and Nano Materials, 2024, 15(3): 405–431. (SCI)
(3) Qiping Xu*, Jinyang Liu. Dynamic research on nonlinear locomotion of inchworm-inspired soft crawling robot[J]. Soft Robotics, 2023, 10(3): 660–672. (SCI)
(4) Qiping Xu*, Jinyang Liu. An improved dynamic formulation for nonlinear response analysis of thin soft silicone plates with large deflection[J]. Thin-Walled Structures, 2022, 176: 109333. (SCI)
(5) Qiping Xu, Jinyang Liu*. Effective enhanced model for a large deformable soft pneumatic actuator[J]. Acta Mechanica Sinica, 2020, 36(1): 245–255. (SCI)
(6) Qiping Xu, Jinyang Liu *, Lizheng Qu. Dynamic modeling for silicone beams using higher-order ANCF beam elements and experiment investigation[J]. Multibody System Dynamics, 2019, 46(4): 307–328. (SCI)
(7) Qiping Xu, Jinyang Liu *, Lizheng Qu. A higher-order plate element formulation for dynamic analysis of hyperelastic silicone plate[J]. Journal of Mechanics, 2019, 35(6): 795–808. (SCI)
(8) Qiping Xu, Jinyang Liu *. An improved dynamic model for silicone material beam with large deformation[J]. Acta Mechanica Sinica, 2018, 34(4): 744–753. (SCI)
(9) Liwen Zhang, Qiping Xu, Jinyang Liu *. Dynamic modeling for continuous locomotion of bionic soft worm-like robot[J]. International Journal of Non–Linear Mechanics, 2024, 162: 104702. (SCI)
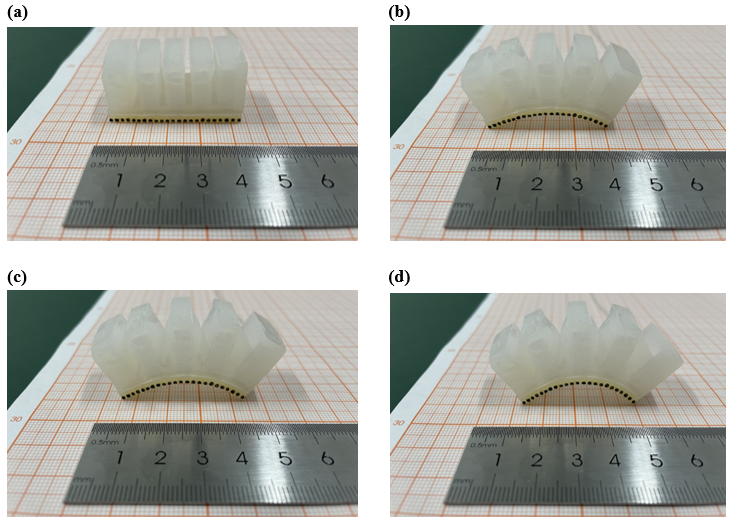
(10) 徐齐平, 张柯航, 应忱航, 鄂世举*. 真空驱动软体可折展致动器驱动特性研究[J]. 中国机械工程, 2025, 36(2): 220–227+237. (EI)
(11) 徐齐平, 刘锦阳*. 大变形硅胶板动力学建模与仿真分析[J]. 振动工程学报, 2019, 32(2): 191–198. (EI)
(12) 徐齐平, 刘锦阳*. 多腔体气动软体致器的建模与仿真[J]. 上海交通大学学报, 2020, 54(6): 551–561. (EI)
(13) 张力文, 徐齐平, 刘锦阳*. 软体尺蠖爬行机器人建模与仿真分析[J]. 上海交通大学学报, 2021, 55(2): 149–160. (EI)
(14) 苏怡仪, 徐齐平, 刘锦阳*. 气动齿状软体驱动器的理论建模、仿真分析及实验研究[J]. 上海交通大学学报, 2023, 57(8): 1016–1027. (EI)
(15) 苏怡仪, 张力文, 徐齐平, 刘锦阳*. 气动齿状软体驱动器的动力学建模与仿真分析[J]. 振动与冲击, 2023, 42(8): 142–151. (EI)
授权发明 / 实用新型专利
徐齐平, 徐康, 鄂世举. 一种测量变形的软体传感器并联装置[P]. 2024, ZL202210621375.4. (发明专利)
徐齐平, 张宏伟, 鄂世举. 一种软传感器三叉形装置[P]. 2024, ZL202210080796.0. (发明专利)
徐齐平, 刘锦阳. 一种软体爬行吸附机器人[P]. 2021, ZL201910122676.0. (发明专利)
徐齐平, 张博, 谢辉宇, 鄂世举. 一种软体爬行机器人[P]. 2023, ZL202320387274.5. (实用新型专利)
徐齐平, 周子期, 鄂世举. 一种介电弹性体软体三指抓手[P]. 2024, ZL202323131378.9. (实用新型专利)
鄂采洋, 应忱航, 王斌, 徐齐平. 一种刚软耦合型抓取装置[P]. 2026, ZL 202520840521.1. (实用新型专利)
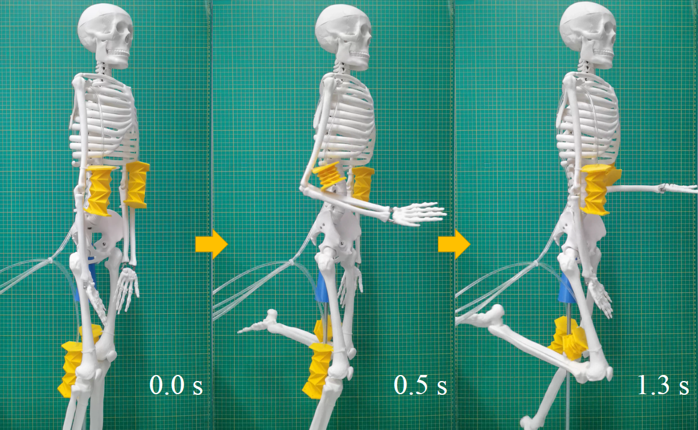
软体可折展驱动器驱动拟人骨架跑步
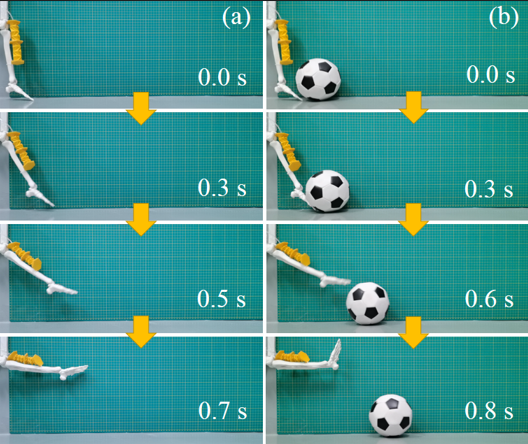
软体可折展驱动器驱动拟人假肢踢球
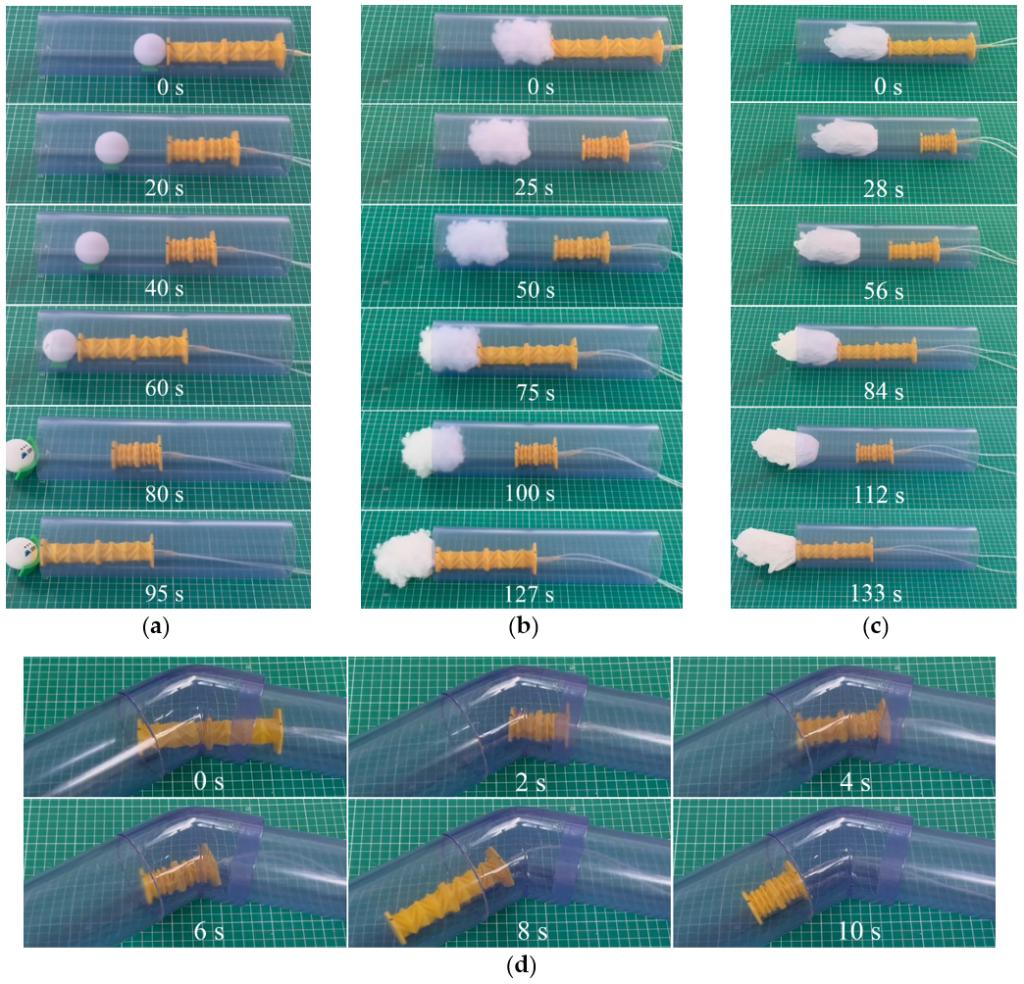
软体可折展爬行机器人在管道中清理障碍物与转弯
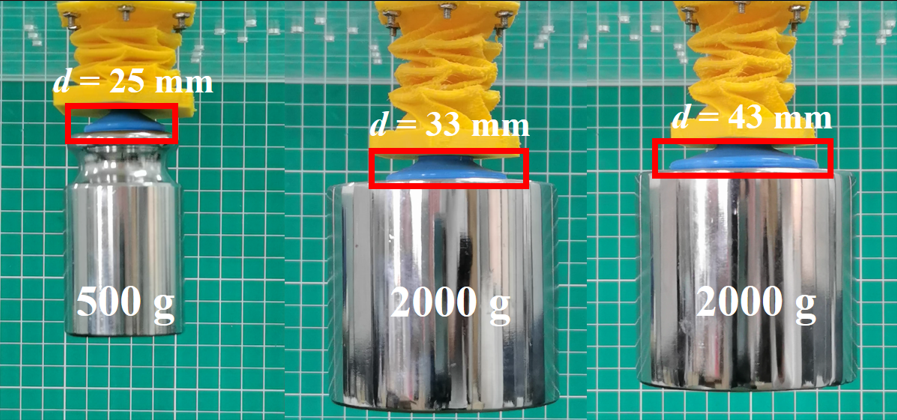
真空吸盘软体触手提升重物
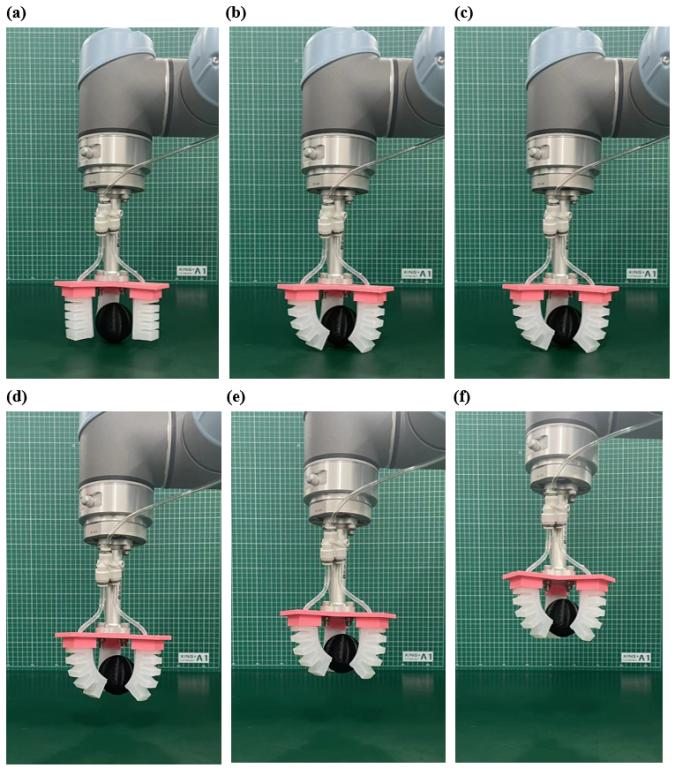
三爪软体抓手适应性包裹抓取小球
仿尺蠖软体爬行机器人蠕动运动
邮编 :
通讯/办公地址 :
移动电话 :
邮箱 :
2019.8 -- 2020.8
新加坡国立大学
机械工程
博士研究生毕业
博士学位
2016.9 -- 2020.9
上海交通大学
力学
博士研究生毕业
博士学位
气动软体爬行机器人
2010.9 -- 2013.7
北京工业大学
机械工程
硕士研究生毕业
硕士学位
2025.1 -- 2025.12
新加坡国立大学 设计与工程学院 访问学者 在岗
2020.11 -- 至今
浙江师范大学 工学院 副教授 在岗
2025.4 -- 至今
《Intelligence & Robotics》期刊青年编委
2024.12 -- 至今
中国机械工程学会高级会员,中国自动化学会会员,中国发明协会会员
2021.9 -- 至今
《Nonlinear Dynamics》、《International Journal of Mechanical Sciences》、《Journal of Mechanisms and Robotics-Transactions of the ASME》、《European Journal of Mechanics A/Solids》、《Part E: Journal of Process Mechanical Engineering》等期刊审稿人
软体机器人、仿生机器人及具身智能机器人
软体、连续体、折纸/剪纸驱动器设计与控制
机器人结构-驱动-感知-功能一体化创新设计
智能超材料、柔性可穿戴器件及可折展机构
机器人外骨骼与人机协同一体化
柔性多体系统动力学与控制
