
孙爱西
![]()
最后更新时间 : ..
男,副教授,工学博士(后),硕士生导师。主持中国博士后科学基金1项,主持教育部协同育人项目2项,近三年主持企业横向项目12项;以一作或一通发表SCI论文13篇(JCR一区期刊3篇,JCR二区期刊8篇),授权发明专利13项,授权实用新型专利7项;近三年担任本科生导师、班主任期间,本科生保研东北大学、南京航天航天大学、苏州大学等985/211名校7人;从事人民电器集团有限公司(中国企业500强)科技副总、金华市智能制造研究院、浙师大金开技术创新研究院、金华市博士创新站(浦江)、金华市百博入企等社会服务工作,相关事迹连续多次在浙中科技大市场公众号上被报道。
研究方向:
1.激光装备研发
2.机械控制与信息处理
3.AI人工智能技术
激光应用:
![]()
激光装备:
激光装备一:复合材料超快激光精密加工装备
该设备采用高功率脉冲激光对碳纤维、玻璃纤维、芳纶纤维等增强复合材料进行高效切割/钻孔。设备采用多轴平台、配备自动影像定位系统,可实现各类斜面、锥面以及球体的三维立体空间超精细加工。设备光学平台可搭载多种类激光器(纳秒、皮秒、飞秒),按照设计图案进行高精度表面加工。
产品特点:
(1)非接触式加工,对材料损伤小,切割精度高
(2)分层切割,切割充分
(3)激光脉冲整形,切割效率高



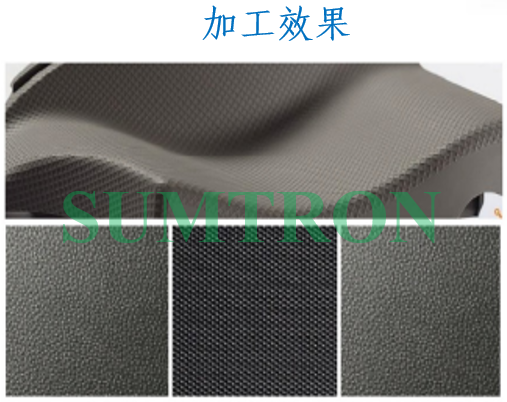
激光装备二:精密模具超快激光刻蚀装备
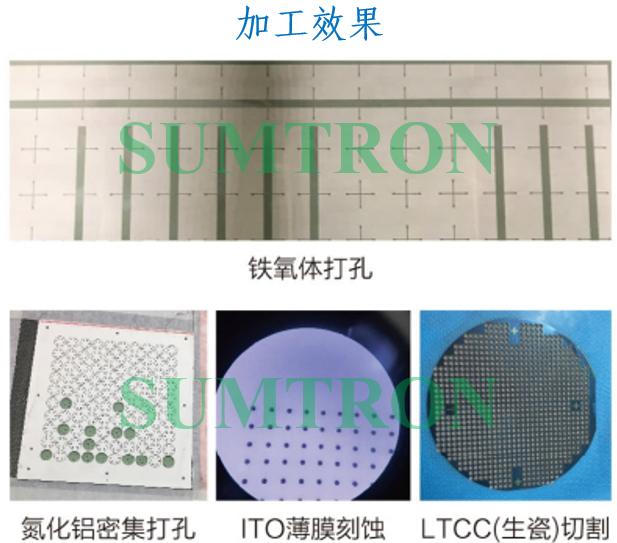
该设备可以在特种金属表面精密加工经计算机设计的凹坑、网纹等微纳结构,如加工非规则形状的纹理(皮质纹理)或几何纹理(金字塔纹理)。可代替传统化学刻蚀工艺,设备环境友好、工艺流程简单。根据激光和材质,可以实现5um-500μm不同深度的表面织构刻蚀,深度可控尺寸精度小于5微米,可实现多轴加工,设备采用多轴平台、配备自动影像定位系统。设备光学平台可搭载纳秒、皮秒、飞秒激光器,按照设计图案进行高精度加工。适用于加工微型模具、冲压模、转印等高精密模具。
产品特点:
(1)非接触式加工,对材料损伤小,切割精度高
(2)激光加工一致性高,无火山口,底部平滑
(3)成熟的工业设计,设备人机交互便捷


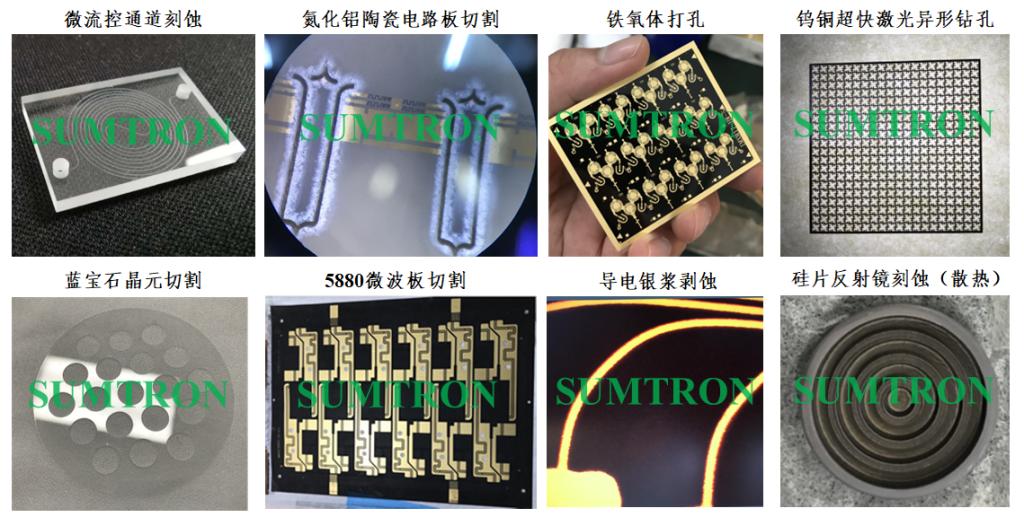
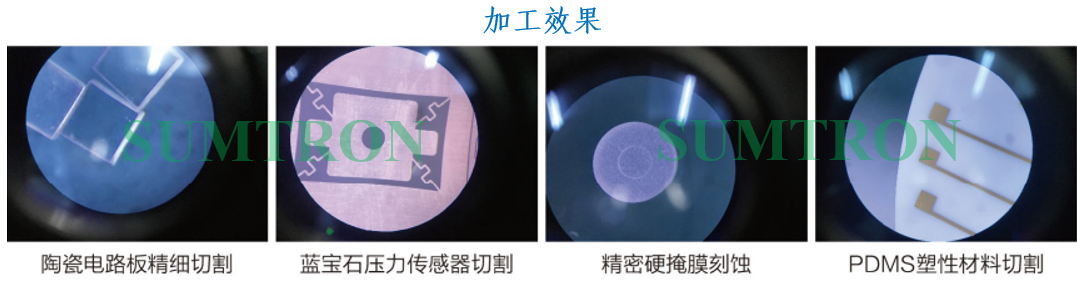
激光装备三:透明硬脆材料激光精密加工装备
采用高能量脉冲激光对玻璃/石英/蓝宝石/碳化硅/金刚石等透明硬脆材料进行高效切割/钻孔/刻蚀。设备配备有自动影像定位系统、环境安全系统,为产品的自动高速切割、钻孔加工提供保障。设备光学平台可搭载多种类激光器(纳秒、皮秒、飞秒),按照设计图案进行高精度加工。
产品特点:
(1)非接触式加工,对材料损伤小,切割精度高
(2)分层切割,切割充分
(3)切割时几乎不会产生碎屑,切割效率高


激光装备四:激光精密焊接装备
区别于普通传感器视觉焦点定位方法,集成高精度相机,高精密滚珠丝杠运动模组,自主研发的焊接软件利用图像识别算法以及运动控制优化步骤,通过采集样品图像对不同位置的焊接模块图形进行算法优化处理并控制焊接头在焊接区域实现精确焊接过程,焊接过程稳定,操作简单,且同样配置通州CCD观测模块,便于观察焊接过程与结果。
产品特点:
(1)广泛应用于电子、汽车、航空等领域
(2)焊接材料广泛,包括不锈钢、铝、铜等
(3)集成保护气、集尘装置
(4)可直接导dxf图纸,操作方便


激光装备五:纳秒激光精密加工装备
紫外纳秒激光与很多材料发生作用时,其短脉冲紫外辐射可以打断分子链结构,实现冷加工,在微纳级超精细加工热敏材料时,紫外纳秒激光具有明显的优势。设备搭配振镜扫描头或准直聚焦加工头,配套自主研发的紫外纳秒激光加工软件,集成同轴CCD影像定位系统,保证加工质量和加工精度。
产品特点:
(1)广泛应用于消费电子、电子元件、生物医疗、科学实验等领域
(2)对于易燃材料、陶瓷材料、塑料与纸张等非金属产品,紫外激光吸收率更好,能够实现良好的加工效果
(3)集成数据库,方便客户工艺开发及加工生产


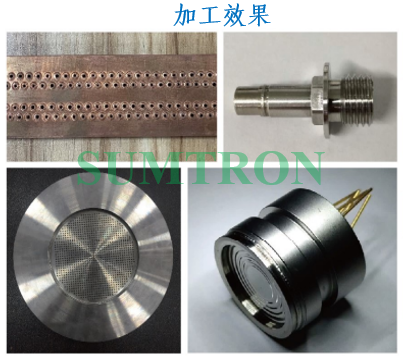
激光装备六:皮秒/飞秒激光精密加工装备
该系统配备皮秒或飞秒超快激光,可实现高速振镜扫描、显微物镜加工、群孔微纳孔加工、高径深比孔、超疏水微纳结构、仿生学表面微结构的制备,以及材料表面可定制化深度、可选择材料种类的剥离、刻蚀等功能。
产品特点:
(1)泛应用于电子、汽车、航空等领域
(2)覆盖大部分材料,包括各类金属、玻璃、陶瓷、硅片、PI高分子等冷加工,保证了材料原本的性能
(3)集成数据库,方便客户工艺开发及加工生产


项目案例:
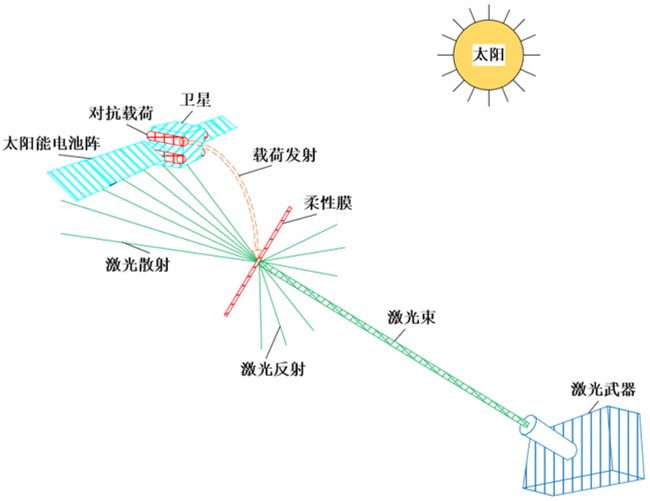
1.国家博士后科学基金助项目“碳纤维复合材料表面微结构对激光的抗毁伤机理研究”
1.1 碳纤维复合材料表面微结构的抗激光毁伤方法研究。在卫星关重件碳纤维面板铝蜂窝夹层结构上,采用沟槽、微球冠等表面微结构进行增反射,减少碳纤维复合材料对激光的吸收,提高抗激光毁伤能力,对卫星进行有效防护。
1.2 碳纤维复合材料表面微结构对激光的抗毁伤机理研究。建立表面微结构的光学性能仿真模型,研究激光在表面微结构的碳纤维复合材料中的行走线路,给出表面微结构参数与靶材对激光的反射性能的关系。
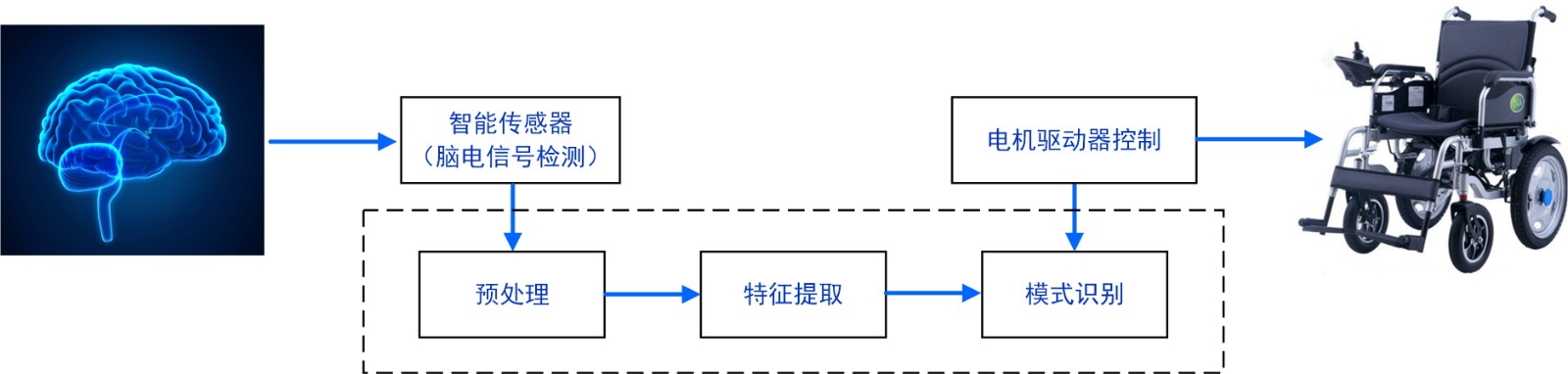
2.金华市揭榜挂帅重大横向项目“基于脑电意念的智能电动轮椅技术开发”
2.1 传感器电极片制备。通过静电自组装法将石墨烯材料进行层层组装,优化传感器电极的结构、厚度,制备出低成本、低能耗的传感器电极片,对脑电波信号进行检测。
2.2 脑电信号识别处理。结合深度卷积网络和多尺度卷积神经网络思想,提出多尺度深度卷积神经网络,以脑电波信号作为神经网络输入,学习运动想象与脑电波信号之间的关系,对运动想象脑电信号进行识别。
2.3 无刷电机驱动器控制开发。设计外围扩展电路、驱动电路、电流检测电路等系统硬件,构建转速和电流双闭环无刷电机驱动器模糊控制系统,建立模糊PID控制器设计步骤、模糊控制规则,开发出高效、低噪的无刷电机驱动器。

3.金华市技术创新项目“无人驾驶观光车的研发与产业化 ”
3.1 无人观光车多物理量传感控制装置设计。自主设计一种无人驾驶观光车的多物理量传感控制装置,包括激光雷达、摄像头、惯性导航系统、车速编码器等多物理量传感器,对车位置、路况信息等多物理量数据进行采集与传输,能够满足观光车的无人控制需求。
3.2 无人观光车运行控制系统开发。基于传感器采集的多物理量数据,开发一种基于模型预测控制 (MPC)算法的智能驾驶观光车运行控制系统,构建系统预测输出与参考轨迹的目标函数及约束条件,采用滚动优化法使得观光车预测局部路径接近参考轨迹,并利用逆纵向动力学模型计算电机转矩、制动力,实现无人观光车运行的实时控制。
3.3 无人观光车自主避障系统开发。根据旅游园区的运行环境,设计一种无人驾驶观光车的自主避障安全防护系统,采用激光雷达的初步定位和摄像头的准确检测,对道路信息和障碍物距离进行检测,并建立环境极线直方图,实时计算避障路径规划,完成无人观光车的自主避障。

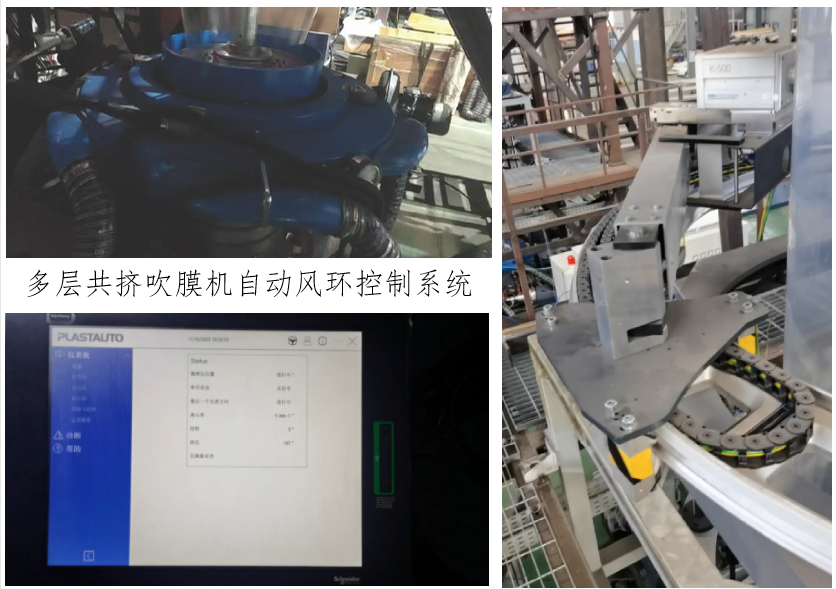
4.温州县级科技计划项目“多层共挤吹膜机自动风环控制系统开发”
4.1 多层共挤吹膜机自动风环流场模型研究。针对自动风环内部的气流特性,采用RNG k-ε等流场模型作为冷却空气的湍流模型,研究多层共挤吹膜机自动风环流场模型,从风环结构参数、吹膜工艺参数等方面,对自动风环流场进行分析研究。
4.2 多层共挤吹膜机自动风环流场机理分析。采用多层共挤吹膜机自动风环流场模型,研究膜泡定型多个控制参数的耦合机理,并优化多层共挤吹膜机自动风环流场的控制参数,进而通过控制冷却空气在自动风环中的流动状态,保证膜泡稳定性。
4.3 多层共挤吹膜机自动风环控制系统开发。设计上位机HMI界面、出风口电机控制模块等各功能单元,完成控制电气柜安装,进而逐步开发自动风环控制系统。通过将自动风环沿圆周方向分为若干控制区域,结合在线膜厚测量系统反馈的膜厚偏差,通过调节对应区域的冷却速度,实现薄膜厚度的精确闭环控制。
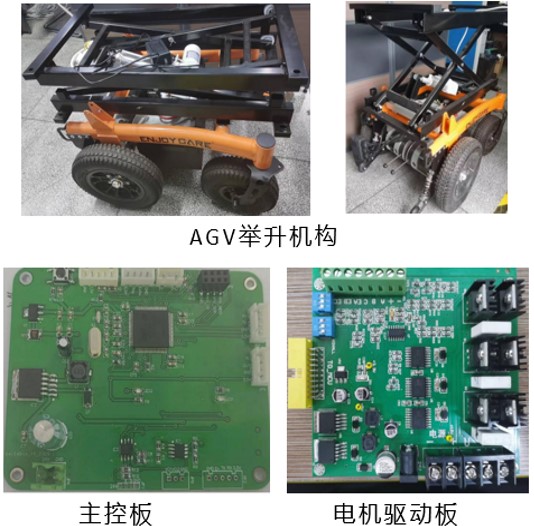
5.国家高新企业横向项目“AGV特种底盘的跨楼层控制系统开发”
5.1 基于特种底盘的 AGV 结构设计优化,对甲方特定款道路轮椅底盘进行结构改造和优化设计,满足车间 AGV 装卸货物和按要求搬运和行驶的使用要求;
5.2 举升机构机电液一体化设计,在底盘基础上开发机电液升降结构,满足货物升降和装卸要求,进而对机构进行性能分析和改进;
5.3 控制系统硬件研制,包括主控单元、通讯模块、避障模块、行走转向模块及故障处理模块等各部分的电气原理图设计和 PCB 电路图设计,并完成控制器整体安装;
5.4 跨楼层AGV控制程序开发,包括与电梯完成信息传递的通讯模块、驱动底盘行走模块、升降块、避障模块故障处理模块等各部分功能的软件实现。
发明专利:
1.光伏玻璃液滴定向自发运动清洁方法(ZL202110714459.8).
2.基于脑电眼电信号的自动升降病床系统(ZL202210842339.0).
3.变径薄壁金属滤网组合式加工方法(ZL202111089791.6).
4.飞机液压系统复杂曲面安全滤网组合加工方法(ZL202111089937.7).
5.光伏增效微结构紫外激光加工装置及方法(ZL202111190725.8).
6.双电机驱动巡边自动调节风环(ZL202411087285.7).
SCI期刊论文:
1.EEG and Eye-EMG combined control of rehabilitation wheelchair using an improved genetic algorithm(JCR一区).
2.Combined control of rehabilitation wheelchair using periocular electromyography and electroencephalography(JCR一区).
3.Heterogeneous interface enhanced polyurethane/MXene@Fe3O4 composite elastomers for electromagnetic wave absorption and thermal conduction(JCR一区).
4.Temperature-stimulated composite foams for reversibly switching microwave absorption towards electromagnetic interference shielding capability(JCR二区).
5.Numerical simulation of continuous laser microdrilling of ultrathick aluminum honeycomb sandwich panels(JCR二区).
6.Thermal damage of aluminum honeycomb panel irradiated by continuous laser(JCR二区).
邮编 :
通讯/办公地址 :
邮箱 :
2013.9 -- 2018.1
南京理工大学
080202
博士研究生毕业
博士学位
2020.9 -- 至今
浙江师范大学 工学院 在岗
激光装备研发
机械控制与信息处理
AI人工智能技术
